Lab23 Linebuffer_1
Second way of linebuffer
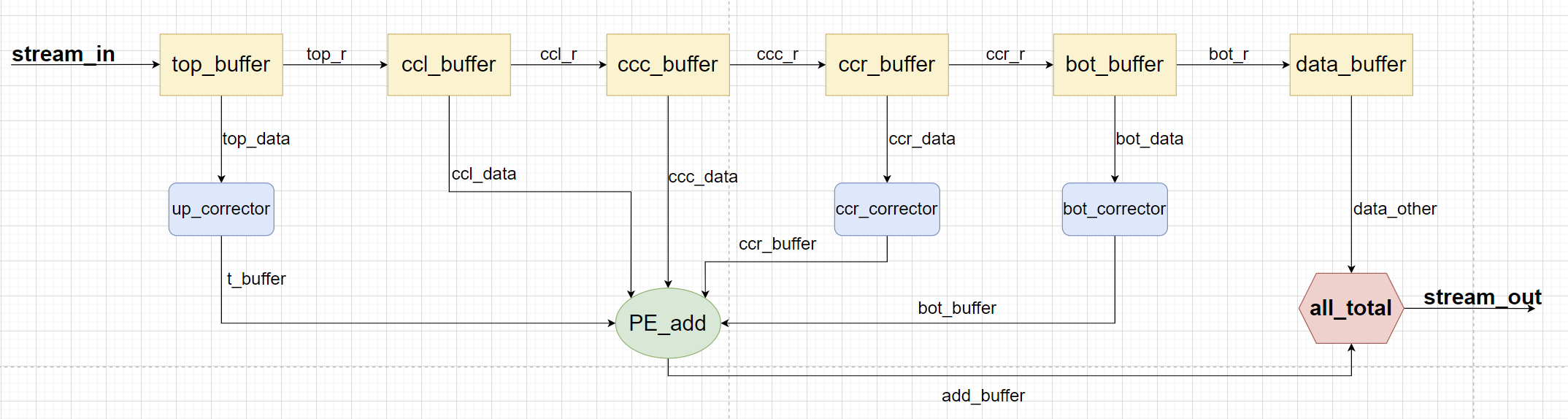
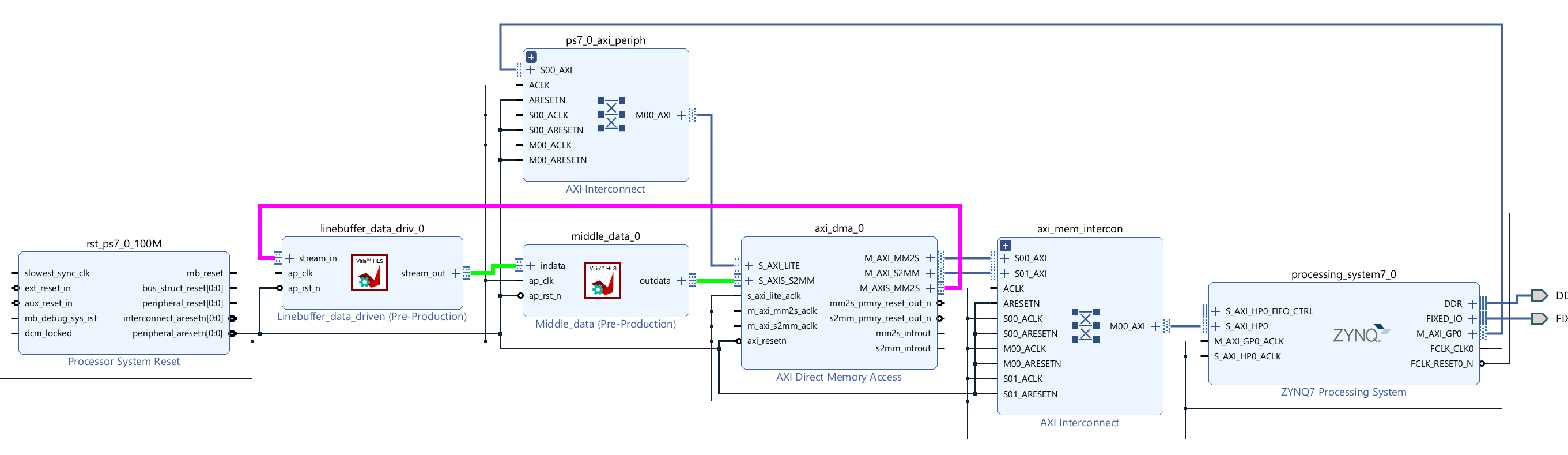
The second way is different from the first way because we can use the data_drive to implement the line buffer structure. We use the 5-point to compute the Jacobi in this example, as shown below. The system view is shown below:
I will explain the functions and parameters so you can understand them better. First, the buffer module aims to select the data corresponding to the location. For example, we need five parts of data from five locations, like the following:
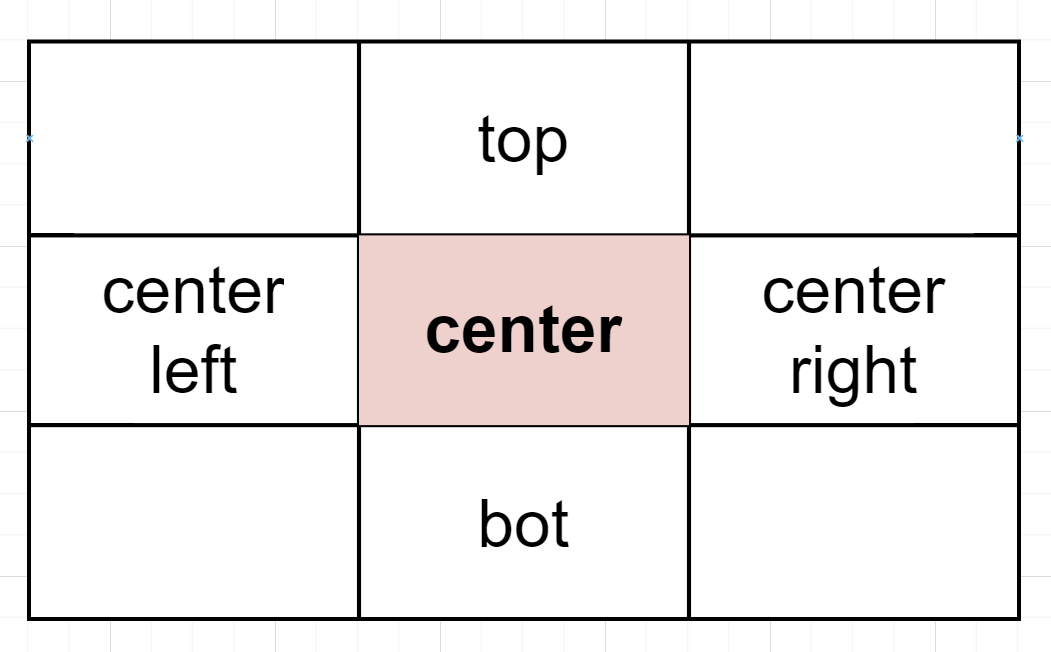
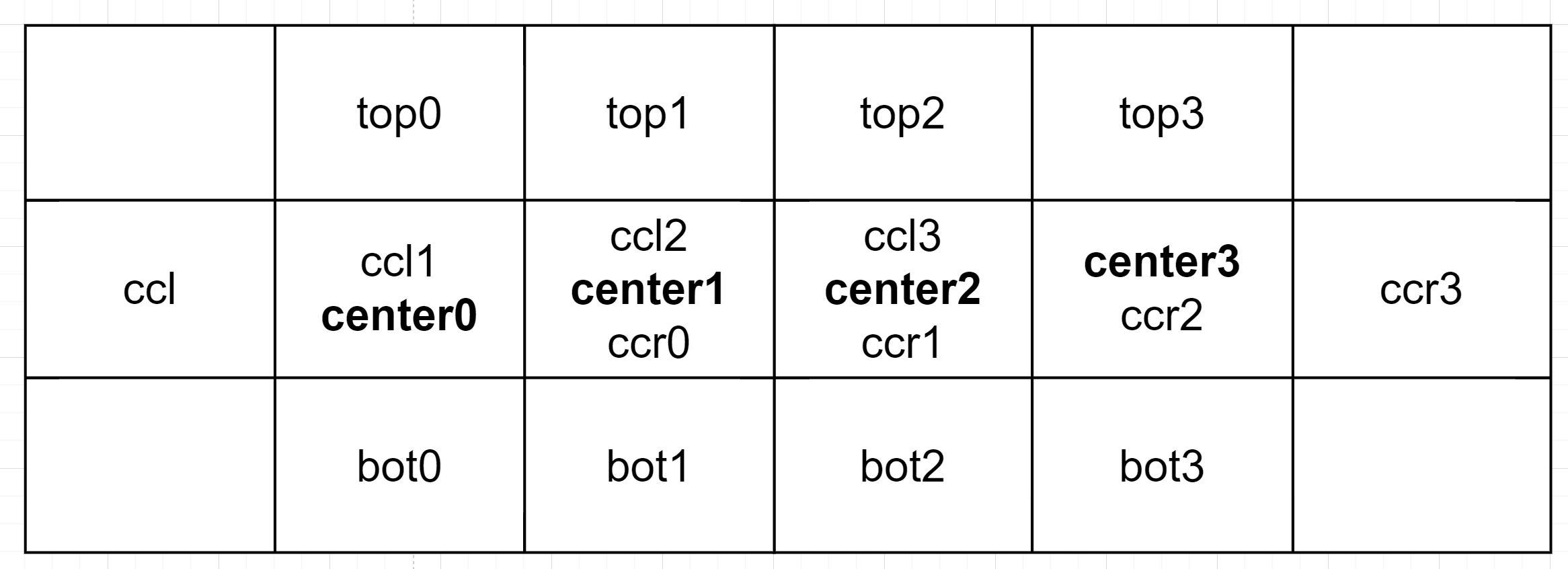
If we want to get the result of the center data, we need to get the top data, center left data, center correct data, and the bot data to compute their addition to get the new center data. We transmit data as a stream to save time reading data from DDR. So we must provide a d,ata buffer channel until we finish the computing. If the matrix size is 3×6, the output data size should be 3×6. Then we will computer the number of the center data, which is four like below. Here, we use ccc to replace the center data and ccl to replace the center left data and ccr to replace the center right data.
So the top_buffer module only contains the first row’s data for every three rows of data, and the ccl_buffer module contains the center-left data for every three rows of data. And the ccc_buffer ccr_buffer and bot_buffermodules, respectively, contain the center data, center-right data, and bot data for every three rows of data. The data_buffercontains the data except the center data because the center data will be center-right, and the center data will be replaced 0 temporarily. The corrector modules want to move the data from all five locations to the center location so that the PE_add module can get all the data needed to compute. The PE_add module contains the new center data; other data will be 0. The all_toatl module will combine the data, including the center location and the new center data.
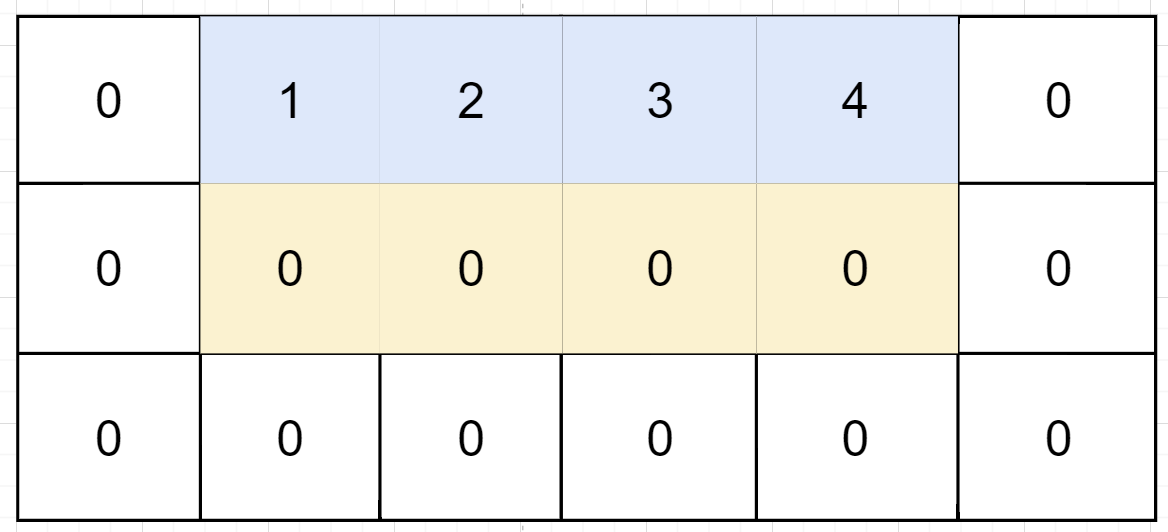
For example, if we have the 18 data, which is a 3×6 matrix like below, we want to update the center data (yellow marked) by computing the addition.
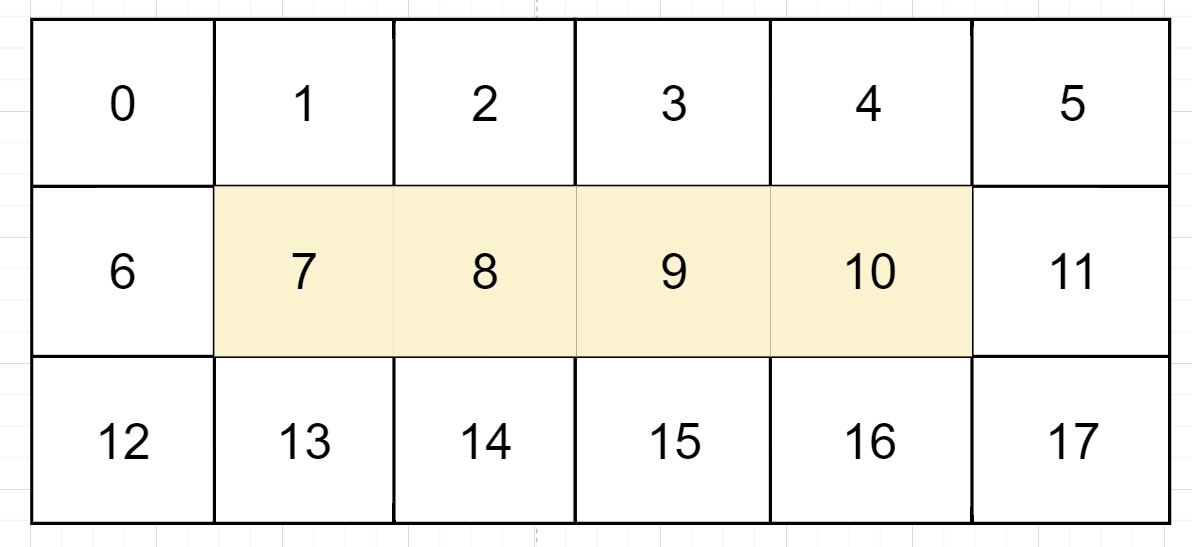
From the top_buffer module, we can get the top_data like below:
From the up_corrector module, we can get the top_data like below:
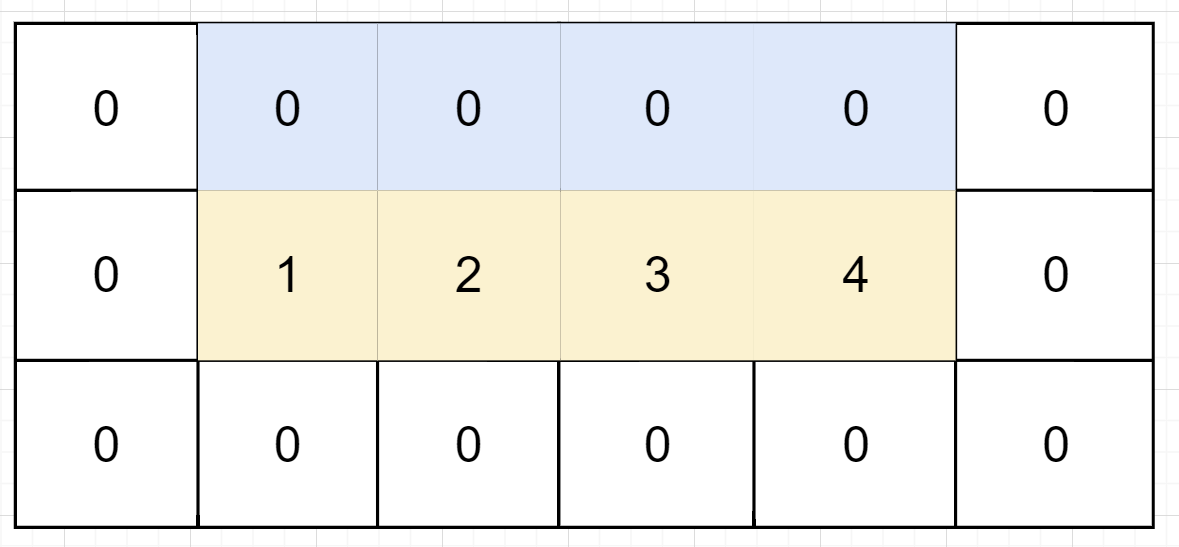
The other four parts of data can all be obtained by the above way.
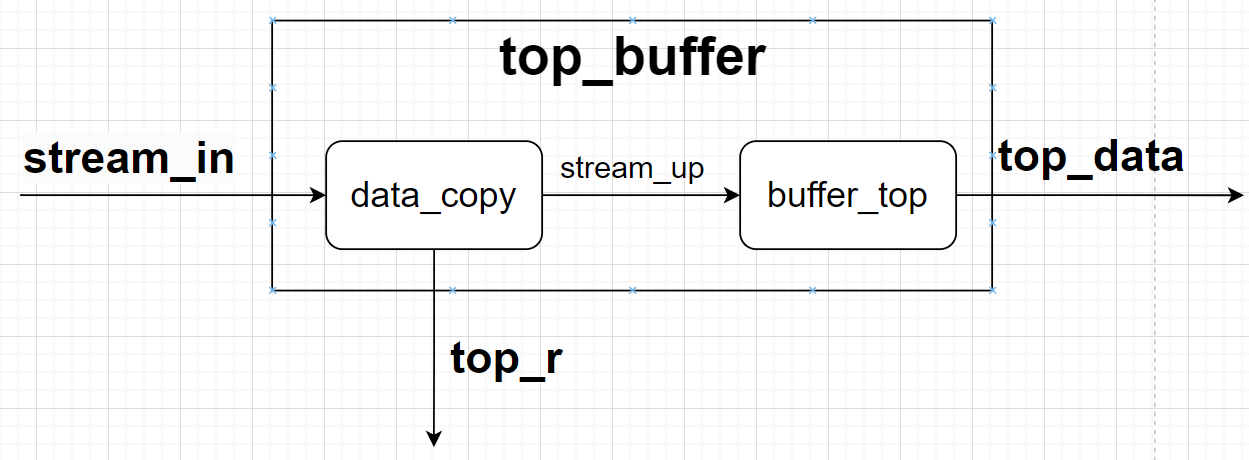
Every buffer module contains two functions: copy the data, transfer the input data to the next module, and choose the data from five parts of the location. The buffer module view is shown below:
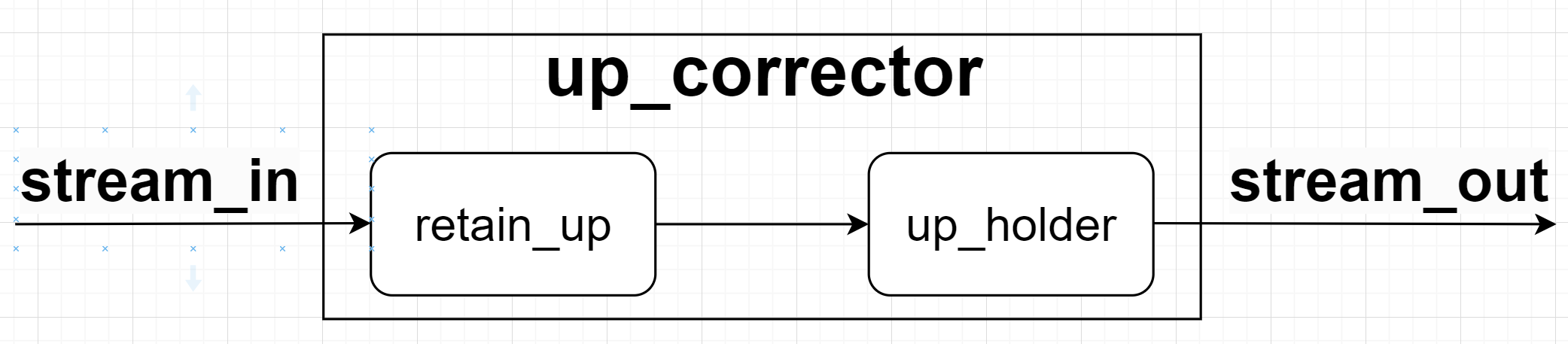
Every corrector module contains two functions: retaining the data from the top or ccr or bot location and keeping these. data the same as the center data location.
FIFO_buffer.hpp
#ifndef __FIFO_BUFFER__
#define __FIFO_BUFFER__
#include "linebuffer_1.h"
template<int PPC, int width, int ID>
void right_holder(hls::stream<mat> &stream_in,hls::stream<mat> &stream_out)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_out register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int element_counter=0;
static int batch_counter=0;
if(!inite)
{
if(!stream_in.empty()){
inite=true;
}
element_counter=0;
batch_counter=0;
}
else
{
mat temp;
if(batch_counter==width-1)
{
if(element_counter==PPC-1)
{
temp=0;
stream_out.write(temp);
}
else
{
temp=stream_in.read();
stream_out.write(temp);
}
}
else{
temp=stream_in.read();
stream_out.write(temp);
}
if(element_counter==PPC-1)
{
element_counter=0;
if(batch_counter==width-1)
{
batch_counter=0;
}
else
{
batch_counter++;
}
}
else
{
element_counter++;
}
}
}
template< int PPC, int width, int ID>
void retain_right(hls::stream<mat> &right_stream,hls::stream<mat> &U_left)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=right_stream register_mode=off
#pragma HLS INTERFACE mode=AXIS port=U_left register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inited=false;
static int element_counter = 0;
static int batch_counter = 0;
if(!inited)
{
if(!right_stream.empty())
{
inited = true;
}
element_counter=0;
batch_counter=0;
}
else
{
mat temp;
temp=right_stream.read();
if(batch_counter==0)
{
}
else
{
U_left.write(temp);
}
if(batch_counter==39)
{
batch_counter=0;
}
else
{
batch_counter++;
}
}
}
template<int PPC, int width, int ID>
void ccr_corrector(hls::stream<mat>& stream_in, hls::stream<mat>& stream_out){
#pragma HLS INTERFACE axis register_mode=off port=stream_in
#pragma HLS INTERFACE axis register_mode=off port=stream_out
#pragma HLS INTERFACE ap_ctrl_none port=return
hls_thread_local hls::stream<mat,total> data_path;
hls_thread_local hls::task drop(retain_right<PPC, width, ID>, stream_in, data_path);
hls_thread_local hls::task pad_1(right_holder<PPC, width, ID>, data_path, stream_out);
}
template<int PPC, int width, int ID>
void bot_holder(hls::stream<mat> &stream_in,hls::stream<mat> &stream_out)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_out register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int element_counter=0;
static int batch_counter=0;
if(!inite)
{
if(!stream_in.empty()){
inite=true;
}
element_counter=0;
batch_counter=0;
}
else
{
mat temp;
if(batch_counter==width-2)
{
temp=stream_in.read();
stream_out.write(temp);
}
else{
temp=0;
stream_out.write(temp);
}
if(element_counter==PPC-1)
{
element_counter=0;
if(batch_counter==width-1)
{
batch_counter=0;
}
else
{
batch_counter++;
}
}
else
{
element_counter++;
}
}
}
template< int PPC, int width, int ID>
void retain_bot(hls::stream<mat> &stream_in,hls::stream<mat> &stream_bot)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_bot register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
static int row_counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
temp=stream_in.read();
if(row_counter<width-1)
{
}
else
{
stream_bot.write(temp);
}
if(counter==PPC-1)
{
counter=0;
if(row_counter==width-1)
{
row_counter=0;
}
else
{
row_counter++;
}
}
else
{
counter++;
}
}
}
template<int PPC, int width, int ID>
void bot_corrector(hls::stream<mat>& stream_in, hls::stream<mat>& stream_out){
#pragma HLS INTERFACE axis register_mode=off port=stream_in
#pragma HLS INTERFACE axis register_mode=off port=stream_out
#pragma HLS INTERFACE ap_ctrl_none port=return
hls_thread_local hls::stream<mat,total> data_path;
hls_thread_local hls::task drop(retain_bot<PPC, width, ID>, stream_in, data_path);
hls_thread_local hls::task pad_1(bot_holder<PPC, width, ID>, data_path, stream_out);
}
template<int PPC, int width,int ID>
void up_holder(hls::stream<mat> &stream_in,hls::stream<mat> &stream_out)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_out register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int element_counter=0;
static int batch_counter=0;
if(!inite)
{
if(!stream_in.empty()){
inite=true;
}
element_counter=0;
batch_counter=0;
}
else
{
mat temp;
if(batch_counter>0&&batch_counter<width-1)
{
temp=stream_in.read();
stream_out.write(temp);
}
else{
temp=0;
stream_out.write(temp);
}
if(element_counter==PPC-1)
{
element_counter=0;
if(batch_counter==width-1)
{
batch_counter=0;
}
else
{
batch_counter++;
}
}
else
{
element_counter++;
}
}
}
template< int PPC, int width, int ID>
void retain_up(hls::stream<mat> &stream_in,hls::stream<mat> &stream_bot)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_bot register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
static int row_counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
temp=stream_in.read();
if(row_counter==0)
{
stream_bot.write(temp);
}
else
{
}
if(counter==PPC-1)
{
counter=0;
if(row_counter==width-1)
{
row_counter=0;
}
else
{
row_counter++;
}
}
else
{
counter++;
}
}
}
template<int PPC, int width, int ID>
void up_corrector(hls::stream<mat>& stream_in, hls::stream<mat>& stream_out){
#pragma HLS INTERFACE axis register_mode=off port=stream_in
#pragma HLS INTERFACE axis register_mode=off port=stream_out
#pragma HLS INTERFACE ap_ctrl_none port=return
hls_thread_local hls::stream<mat,total> data_path;
hls_thread_local hls::task drop(retain_up<PPC, width, ID>, stream_in, data_path);
hls_thread_local hls::task pad_1(up_holder<PPC, width, ID>, data_path, stream_out);
}
template<int ID>
void data_copy(hls::stream<mat> &stream_in,hls::stream<mat> &stream_1,hls::stream<mat> &stream_2)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_1 register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_2 register_mode=off
#pragma HLS PIPELINE II=1 style=flp
mat temp;
temp=stream_in.read();
stream_1.write(temp);
stream_2.write(temp);
}
template<int ID>
void PE_add(hls::stream<mat> &up_in,hls::stream<mat> &cl_in,hls::stream<mat> &cc_in,
hls::stream<mat> &cr_in,hls::stream<mat> &b_in,hls::stream<mat> &out)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=axis port=up_in
#pragma HLS INTERFACE mode=axis port=cl_in
#pragma HLS INTERFACE mode=axis port=cc_in
#pragma HLS INTERFACE mode=axis port=cr_in
#pragma HLS INTERFACE mode=axis port=b_in
#pragma HLS INTERFACE mode=axis port=out
#pragma HLS PIPELINE II=1 style=flp
static mat up,cl,cc,cr,b;
static mat sum;
up=up_in.read();
cl=cl_in.read();
cc=cc_in.read();
cr=cr_in.read();
b=b_in.read();
sum=up+cl+cc+cr+b;
out.write(sum);
}
template<int ID>
void all_total(hls::stream<mat>& stream_in, hls::stream<mat>& stream_in1,hls::stream<mat>& stream_out)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=axis port=stream_in register_mode=off
#pragma HLS INTERFACE mode=axis port=stream_in1 register_mode=off
#pragma HLS INTERFACE mode=axis port=stream_out register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static mat add1,add2;
static mat sum;
add1=stream_in.read();
add2=stream_in1.read();
sum=add1+add2;
stream_out.write(sum);
}
template<int ID>
void ccl_holder(hls::stream<mat> &stream_in,hls::stream<mat> &stream_out)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_out register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
if(counter==0)
{
temp=0;
stream_out.write(temp);
}
else
{
temp=stream_in.read();
stream_out.write(temp);
}
counter++;
}
}
#endif
module.cpp
#include "linebuffer_1.h"
void buffer_top(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_up register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
static int row_counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
temp=stream_in.read();
if(row_counter<HEIGHT-2)
{
if(counter==0||counter==WIDTH-1)
{
temp=0;
stream_up.write(temp);
}
else
{
stream_up.write(temp);
}
}
else
{
temp=0;
stream_up.write(temp);
}
if(counter==WIDTH-1)
{
counter=0;
if(row_counter==HEIGHT-1)
{
row_counter=0;
}
else
{
row_counter++;
}
}
else
{
counter++;
}
}
}
void top_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_top)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_R register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_top register_mode=off
hls_thread_local hls::stream<mat,total> buffer_up,top,fl,top_data;
hls_thread_local hls::task data_0(data_copy<0>,stream_in,buffer_up,stream_R);
hls_thread_local hls::task top_1(buffer_top,buffer_up,stream_top);
}
void buffer_ccl(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_up register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
static int row_counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
temp=stream_in.read();
if(row_counter>0&&row_counter<HEIGHT-1)
{
if(counter<WIDTH-2)
{
stream_up.write(temp);
}
else
{
temp=0;
stream_up.write(temp);
}
}
else
{
temp=0;
stream_up.write(temp);
}
if(counter==WIDTH-1)
{
counter=0;
if(row_counter==HEIGHT-1)
{
row_counter=0;
}
else
{
row_counter++;
}
}
else
{
counter++;
}
}
}
void ccl_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_ccc)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_R register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_ccc register_mode=off
hls_thread_local hls::stream<mat,total> ccl,ccl_choose;
hls_thread_local hls::task data_1(data_copy<1>,stream_in,ccl,stream_R);
hls_thread_local hls::task data_ccc(buffer_ccl,ccl,ccl_choose);
hls_thread_local hls::task ccl_1(ccl_holder<0>,ccl_choose,stream_ccc);
}
void buffer_ccc(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_up register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
static int row_counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
temp=stream_in.read();
if(row_counter>0&&row_counter<HEIGHT-1)
{
if(counter>0&&counter<WIDTH-1)
{
stream_up.write(temp);
}
else
{
temp=0;
stream_up.write(temp);
}
}
else
{
temp=0;
stream_up.write(temp);
}
if(counter==WIDTH-1)
{
counter=0;
if(row_counter==HEIGHT-1)
{
row_counter=0;
}
else
{
row_counter++;
}
}
else
{
counter++;
}
}
}
void ccc_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_ccc)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_R register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_ccc register_mode=off
hls_thread_local hls::stream<mat,total> ccc_data;
hls_thread_local hls::task data_2(data_copy<2>,stream_in,ccc_data,stream_R);
hls_thread_local hls::task data_ccc(buffer_ccc,ccc_data,stream_ccc);
}
void buffer_ccr(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_up register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
static int row_counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
temp=stream_in.read();
if(row_counter>0&&row_counter<HEIGHT-1)
{
if(counter>1)
{
stream_up.write(temp);
}
else
{
temp=0;
stream_up.write(temp);
}
}
else
{
temp=0;
stream_up.write(temp);
}
if(counter==WIDTH-1)
{
counter=0;
if(row_counter==HEIGHT-1)
{
row_counter=0;
}
else
{
row_counter++;
}
}
else
{
counter++;
}
}
}
void ccr_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_ccr)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_R register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_ccr register_mode=off
hls_thread_local hls::stream<mat,total> ccr;
hls_thread_local hls::task data_3(data_copy<3>,stream_in,ccr,stream_R);
hls_thread_local hls::task data_ccr(buffer_ccr,ccr,stream_ccr);
}
void buffer_bot(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_up register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
static int row_counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
temp=stream_in.read();
if(row_counter>1)
{
if(counter==0||counter==WIDTH-1)
{
temp=0;
stream_up.write(temp);
}
else
{
stream_up.write(temp);
}
}
else
{
temp=0;
stream_up.write(temp);
}
if(counter==WIDTH-1)
{
counter=0;
if(row_counter==HEIGHT-1)
{
row_counter=0;
}
else
{
row_counter++;
}
}
else
{
counter++;
}
}
}
void bot_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_bot)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_R register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_bot register_mode=off
hls_thread_local hls::stream<mat,total> bot,fl;
hls_thread_local hls::task data_4(data_copy<4>,stream_in,bot,stream_R);
hls_thread_local hls::task bot_data(buffer_bot,bot,stream_bot);
}
void data_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_up register_mode=off
#pragma HLS PIPELINE II=1 style=flp
static bool inite=false;
static int counter=0;
static int row_counter=0;
if(!inite)
{
if(!stream_in.empty())
{
inite=true;
}
}
else
{
mat temp;
temp=stream_in.read();
if(row_counter>0&&row_counter<HEIGHT-1)
{
if(counter==0||counter==WIDTH-1)
{
stream_up.write(temp);
}
else
{
temp=0;
stream_up.write(temp);
}
}
else
{
stream_up.write(temp);
}
if(counter==WIDTH-1)
{
counter=0;
if(row_counter==HEIGHT-1)
{
row_counter=0;
}
else
{
row_counter++;
}
}
else
{
counter++;
}
}
}
linebuffer_1.h
#include <stdio.h>
#include <assert.h>
#include <ap_fixed.h>
#include "hls_task.h"
#include "hls_stream.h"
#include "FIFO_buffer.hpp"
#include <ap_axi_sdata.h>
#ifndef __LINEBUFFER_1__
#define __LINEBUFFER_1__
#define WIDTH 13
#define HEIGHT 3
#define total 52
typedef int mat;
typedef hls::stream<mat> Mat_stream;
typedef hls::axis<mat,0,0,0> F_mat;
typedef hls::stream<F_mat> F_stream;
void linebuffer_data_driven(hls::stream<mat> &stream_in,hls::stream<mat> &stream_out);
void buffer_up(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up);
void top_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_top);
void buffer_ccl(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up);
void ccl_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_ccc);
void buffer_ccc(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up);
void ccc_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_ccc);
void buffer_ccr(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up);
void ccr_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_ccc);
void buffer_bot(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up);
void bot_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_R,hls::stream<mat> &stream_top);
void cr_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up);
void data_buffer(hls::stream<mat> &stream_in,hls::stream<mat> &stream_up);
#endif
linebuffer_2.cpp
#include "linebuffer_1.h"
void linebuffer_data_driven(hls::stream<mat> &stream_in,hls::stream<mat> &stream_out)
{
#pragma HLS INTERFACE ap_ctrl_none port=return
#pragma HLS INTERFACE mode=AXIS port=stream_in register_mode=off
#pragma HLS INTERFACE mode=AXIS port=stream_out register_mode=off
hls_thread_local hls::stream<mat,total> top_r,top_data,ccl_r,add_data1,ccc_r,ccr_r,ccr_data,bot_r,bot_data;
hls_thread_local hls::stream<mat,total> cr_buffer,b_buffer,t_buffer,ccc_data,ccl_data,data_other,add_buffer;
hls_thread_local hls::task top(top_buffer,stream_in,top_r,top_data);
hls_thread_local hls::task t(up_corrector<WIDTH,HEIGHT,0>,top_data,t_buffer);///cr
hls_thread_local hls::task ccl(ccl_buffer,top_r,ccl_r,ccl_data);
hls_thread_local hls::task ccc(ccc_buffer,ccl_r,ccc_r,ccc_data);
hls_thread_local hls::task ccr(ccr_buffer,ccc_r,ccr_r,ccr_data);
hls_thread_local hls::task cr(ccr_corrector<WIDTH,HEIGHT,0>,ccr_data,cr_buffer);///cr
hls_thread_local hls::task bot(bot_buffer,ccr_r,bot_r,bot_data);
hls_thread_local hls::task b(bot_corrector<WIDTH,HEIGHT,0>,bot_data,b_buffer);//bot
hls_thread_local hls::task add(PE_add<6>,t_buffer,ccl_data,ccc_data,cr_buffer,b_buffer,add_buffer);
hls_thread_local hls::task data_around(data_buffer,bot_r,data_other);
hls_thread_local hls::task all_total_sum(all_total<0>,add_buffer,data_other,stream_out);//bot
}
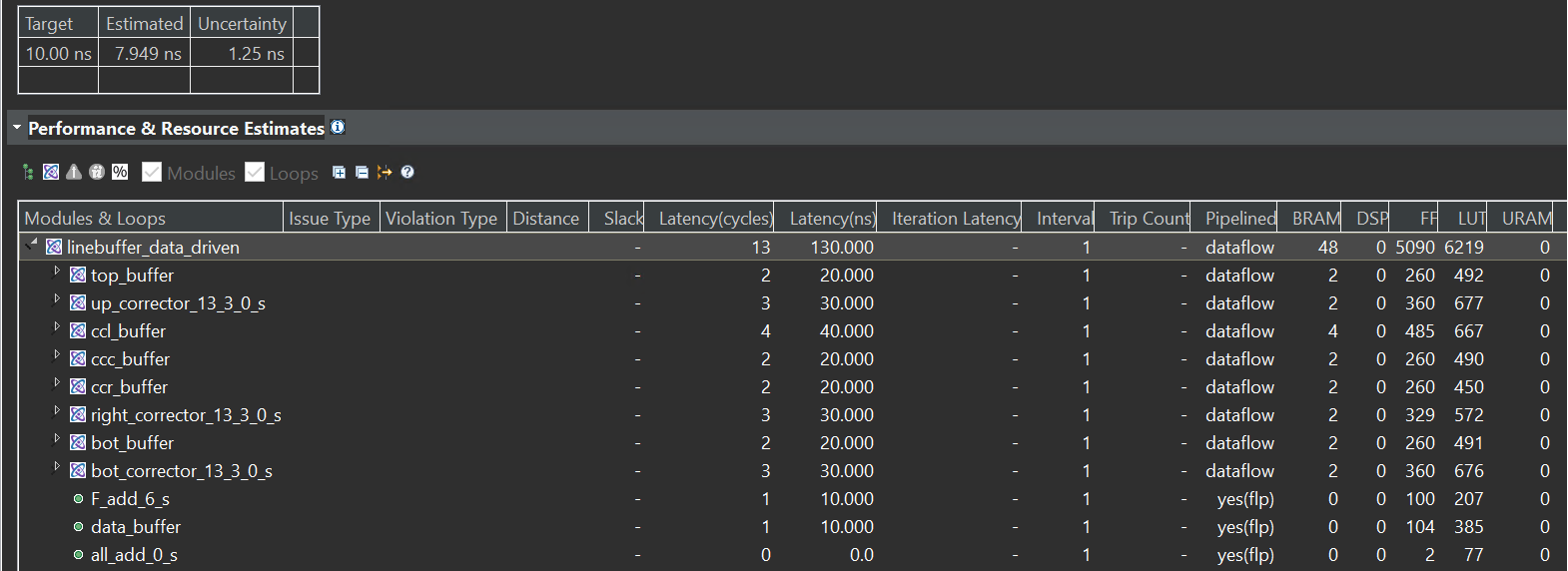
The synthesis report is shown below:
linebuffer_1_tb.cpp
#include "linebuffer_1.h"
int main()
{
mat outdata;
mat outdata1;
hls::stream <mat,total> in;
hls::stream <mat,total> out,out1;
for(int i=0;i<78;i++)
{
in.write(i+1);
}
linebuffer_data_driven(in,out1);
for(int i=0;i<78;i++)
{
{
outdata1=out1.read();
printf("outdata1 is %d\r\n",outdata1);
}
}
}
Create the Vivado project
The configure block design can use reference materials here. We also need to choose the number of the DMA according to the number of the interface.
Run synthesis, Implementation, and generate bitstream
It may show some errors about I/O Ports; please fix them.
Download the bitstream file to PYNQ

from pynq import Overlay
from pynq import allocate
import numpy as np
hw = Overlay('design_1.bit')
s2mm = hw.axi_dma_0.sendchannel
mm2s = hw.axi_dma_0.recvchannel
N = 78
oBuf_0 = allocate(shape=(N,), dtype = np.int32)
iBuf_0 = allocate(shape=(N,), dtype = np.int32)
for i in range(N):
oBuf_0[i]= i
s2mm.transfer(oBuf_0)
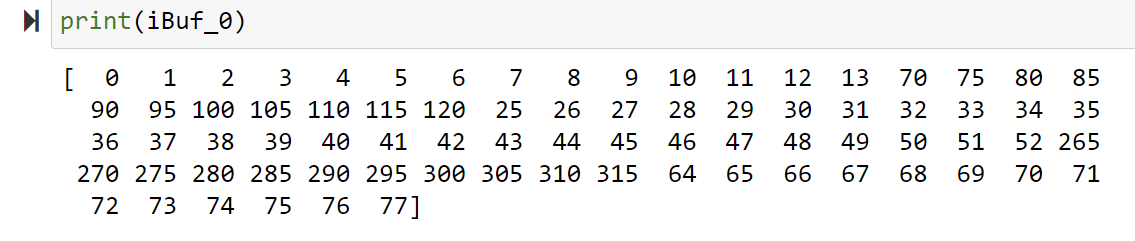
mm2s.transfer(iBuf_0)
s2mm.wait()
mm2s.wait()
We will see:
Demonstrate
Please finish the example in a data-driven way and implement it on the PYNQ-Z2 board.